

旋转变压器与光电编码器区别及工作原理
使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意变化的自动控制系统
通过改变模拟量的设定或通过通讯方式改变对应的地址的数值来改变设定的力矩大小。
通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度
④开关量:开关量只有两种状态,0/1,包括开入量和开出量,反映的是状态。
①正余弦函数关系 ,②或保持特殊的比例关系,③或成线性关系(一定转角范围)
④转子绕组随电机旋转,两个相差90度定子绕组固定,绕组就形成了一个具有角度依赖系数的变压器。
旋转变压器的变压比:是指在规定励磁条件下,最大空载输出电压的基波分量与励磁电压的基波分量之比。
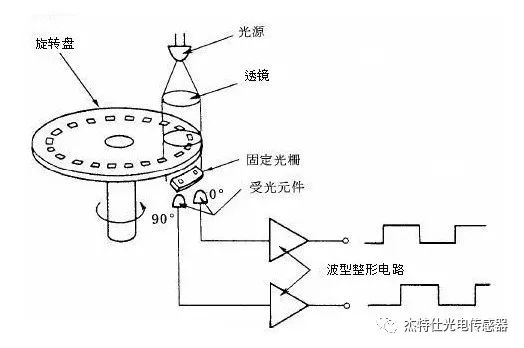
光电编码器的主要工作原理为光电转换,是一种通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器。
工作原理:光栅盘与电动机同轴使电机旋转带动光栅盘旋转,光电检测装置输出脉冲信号,根据该信号计算转速。
②输出的是A、B、Z三组方波脉冲,其中A、B两脉冲相位差相差90度以判断电动机的旋转方向,Z脉冲为每转一个脉冲以便于基准点的定位。
②但其输出的是数字量,在码盘上有若干同心码道,码道由透光和不透光的扇形区间交叉构成,码道数是其码盘的二进制数码位数,码盘的两侧是光源和光敏元件,码盘位置的不同光敏元件受光情况不同输出不同二进制数,来判断码盘位置。
①光电编码器直接输出数字信号,处理简单,容易提高分辨率,缺点不耐冲击,不耐高温,易受辐射干扰。
②旋转变压器具有耐冲击、耐高温、耐油污、高可靠、长寿命等优点,其缺点是输出为调制的模拟信号,输出信号解算较复杂。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

AB两端插在开发板的led上,A端处的LED闪烁,B端不闪烁,始终为低电平。请大神告之原因。
,用来反馈电机的位置(只是反馈电机的位置信号,并不是驱动电机,因为我有
的输出信号是方波信号,我该如何处理成正弦波信号呢?比如说转一转输出一个正弦波,先谢谢大家了。
时,经发光元件发出的光被光栅盘狭缝切割成断续光线,并被接收元件接收产生初始
, 这有助于它用于 stepper/servo 电机控制。在本文中,我们将了解不同类型的
的,旋变的相关应用和目前市场上存在哪些方案。 图1 电机驱动系统的基本框图1. 什么是
的原边,接受励磁电压,励磁频率通常用400、3000及5000HZ等。转子绕...
定子绕组D1-D2接交流电源激磁,转子绕组Z1-Z2接负载ZL当主令轴带动转子转过θ角时,转子各绕组中产生的感应电压。采用不一样接线方式或不同的绕组
,一对极,在解调时候,正弦余弦输出经过解调芯片,输出数字脉冲,按照360度对应2的n次方角度输出?还是有别的算法解调根号下A2+B2等于定值?
您好,我使用AD2S1205解码上海捷纳公司的贝米52.4-4的单通道4极对
,输出12位的位置信息,即0-4096,但是在输出300-2000之间是跳变过去的,不是稳定的输出,即当慢慢
的特点是没产生一个输出脉冲信号就对应于一个增量位移,但是不能通过输出脉冲
出在哪个位置上的增量。它能够产生与位移增量等值的脉冲信号,其作用是提供一种对连
助于它用于步进/伺服电机控制、导航菜单序列和增加/减少数字的值等等。在本篇文章中,我们将了解不同类型的
。 一、伺服系统又称为随动系统,精确的跟随或者复现某个过程的反馈系统。使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意
。一、伺服系统又称为随动系统,精确的跟随或者复现某个过程的反馈系统。使物体的位置、方位、状态等输出被控量能够跟随目标(设定)的任意变化
有3路信号接口,而要和它连接的带有模数转换功能的芯片有6路信号接口,那么它们该如何连接呢?为什么?!!希望各路大神能够指导,谢谢!
因测量精度高,在伺服用永磁同步电机位置检测中大范围的应用。但它有抗震性差的缺点,难以适应恶劣工况。
及引脚功能14XSZ3412-01的数据传输方法如何采用PC/104总线实现
的无人搬运小车PROTUES仿真,导师要求设计实现小车走直线,在垂直路面的方向安装
的模块化系统的一部分。借助包含的软件,可以在各种配置下将 AMC1210 用于
,无需记忆,需找参考点,而且不用一直计数,何时必须了解到位置,何时就去读取它的位置。2、
嗨,我正在计算永磁同步电机 TLE9243QK_BASE_BOARD 在
上的初始位置,我有一个问题,如何计算永磁同步电机 TLE9243QK_BASE_BOARD 在
和数据传输方法,探讨了其在寻北仪系统中与PC/104 总线的接口电路设计,
一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组
。它的转子绕组通过滑环和电刷直接引出,其特点是结构相对比较简单,体积小,但因电刷与滑环
方式中,感应信号VB和激磁信号VK之间的相位差θ角,可通过专用的鉴相器线路检测出来并表示成相应的电压信号,设为U(θ),通
转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。这是目前应用最
(Optical Encoder)俗称“单键飞梭”,其外观好像一个电位器,
一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
做在一个磁路上,装在一个机壳内,构成“粗测”和“精测”电气变速双通道检测装置,用于高精度检测系统和同步系统。
中,定、转子上都有绕组。转子绕组的电信号,通过滑动接触,由转子上的滑环和定子上的电刷引进或引出。由于有刷结构的存在
的转子和定子角位置不同,输出信号能轻松实现对输入正弦载波信号的相位变换和幅值调制,最终由专用的信号处理电路或者某些具备一定功能接口的DSP和单片机,依据输出信号的幅值和相位与正弦载波信号的关系,解析出转子和定子间的角位置关系。
简称旋变,是由经过特殊电磁设计的高性能硅钢叠片和漆包线构成的,相比于采用
是一种电磁式传感器,又称同步分解器。它是一种测量角度用的小型交流电动机,用来测量
在具有环形和 40mm 2 PCB 面积或更小的用于电子设备的典型电机
中,在处理完 RDC、微控制器、接口和网络连接之后,基本上没有任何电压调节器空间。
(简称旋变)是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系,这种
。传感器线圈(励磁、正弦、余弦三组线圈)固定在壳体上,信号线圈固定在转子上。
轴的转动实现实时位置监测与控制。它具有高精度、长寿命、可重复性高、体积小等特点,因此在机器人控制、自动化生产、医疗设施、轮廓检测等方面被广泛应用。
是安装在伺服电机上用来测量磁极位置和伺服电机转角及转速的一种传感器,从物理介质的不同来分,伺服电机
的核心部件之一。它通常由光源和光敏区域组成。光源会发出光线,而光敏区域会根据光线